Key Points
6.01A - represent rotational motion using graphs, written descriptions, and equations; apply mathematical models for constant angular acceleration to solve for unknown values; translate between rotational and translational motion
6.02B - use the rotational version of Newton's 2nd law to connect torque, angular acceleration, and moment of inertia for accelerating or static situations; use center of mass to determine how the object will translate or rotate.
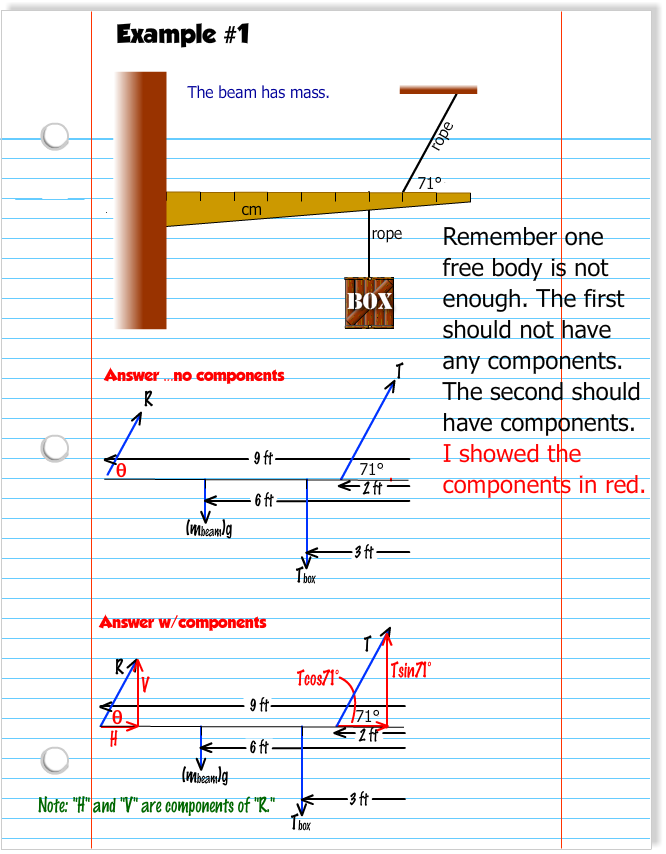
6.03A - draw an extended free body diagram.
6.04B - calculate or compare torques given a force, lever arm, and angle; determine direction of torque about any point, including gravitational torque.
6.05A - describe qualitatively how changing the mass or distribution of mass affects the rotational inertia; understand that rotational inertia is a property of an object
6.06B - recognize the impact of mass, its distribution and angular velocity in the magnitude of rotational kinetic energy; include this when applying concepts of conservation of energy
6.07B - recognize that a change in momentum is caused by an unbalanced external torque applied over a time interval
6.08B - apply conservation of angular momentum qualitatively or quantitatively to determine changes in angular velocity or rotational inertia, torques or other relevant information
6.09B - solve advanced problems that involve calculations of rotational energy, angular momentum and concepts of energy, forces, momentum, and motion.
6.01A - represent rotational motion using graphs, written descriptions, and equations; apply mathematical models for constant angular acceleration to solve for unknown values; translate between rotational and translational motion
6.02B - use the rotational version of Newton's 2nd law to connect torque, angular acceleration, and moment of inertia for accelerating or static situations; use center of mass to determine how the object will translate or rotate.
6.03A - draw an extended free body diagram.
6.04B - calculate or compare torques given a force, lever arm, and angle; determine direction of torque about any point, including gravitational torque.
6.05A - describe qualitatively how changing the mass or distribution of mass affects the rotational inertia; understand that rotational inertia is a property of an object
6.06B - recognize the impact of mass, its distribution and angular velocity in the magnitude of rotational kinetic energy; include this when applying concepts of conservation of energy
6.07B - recognize that a change in momentum is caused by an unbalanced external torque applied over a time interval
6.08B - apply conservation of angular momentum qualitatively or quantitatively to determine changes in angular velocity or rotational inertia, torques or other relevant information
6.09B - solve advanced problems that involve calculations of rotational energy, angular momentum and concepts of energy, forces, momentum, and motion.
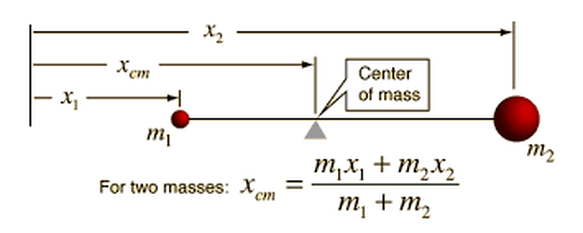
Center of Mass:
- The center of mass is a position defined relative to an object or system of objects. It is the average position of all the parts of the system, weighted according to their masses.
- One quick technique which lets us avoid the use of vector arithmetic is finding the center of mass separately for components along each axis. I.e:
For object positions along the x axis:- x cm = (m1x1 + m2x2 + ... + mnxn) / (m1 + m2 + ... + mn)
- y cm = (m1y1 + m2y2 + ... + mnyn) / (m1 + m2 + ... + mn)
- Newton's second Law of center of mass:
- F net = Macm
- Newton's second Law of center of mass:
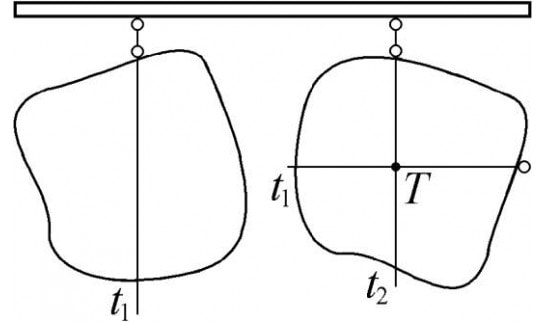
- How to find the center of mass of an irregular shaped object?
- The most practical way depends on the object. If you can divide the shape into two areas of equal mass in two different way then the spot where the two divisions meet is the center of mass.
http://hyperphysics.phy-astr.gsu.edu/hbase/cm.html
https://www.zborovna.sk/kniznica.php?action=show_version&id=17545&hit=119584
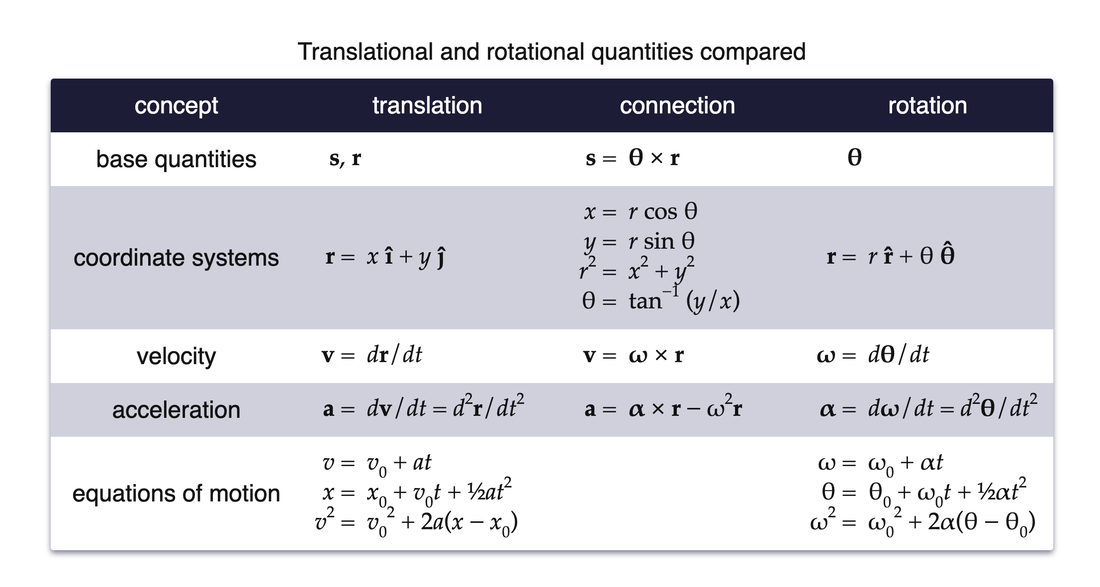
Rotational Kinematics
- Kinematics is the description of motion. The kinematics of rotational motion describes the relationships among rotation angle, angular velocity, angular acceleration, and time.
- Kinematics for rotational motion is completely analogous to translational kinematics, first presented in One-Dimensional Kinematics. Kinematics is concerned with the description of motion without regard to force or mass. We will find that translational kinematic quantities, such as displacement, velocity, and acceleration have direct analogs in rotational motion.
https://opentextbc.ca/physicstestbook2/chapter/kinematics-of-rotational-motion/
Rotational Graphs
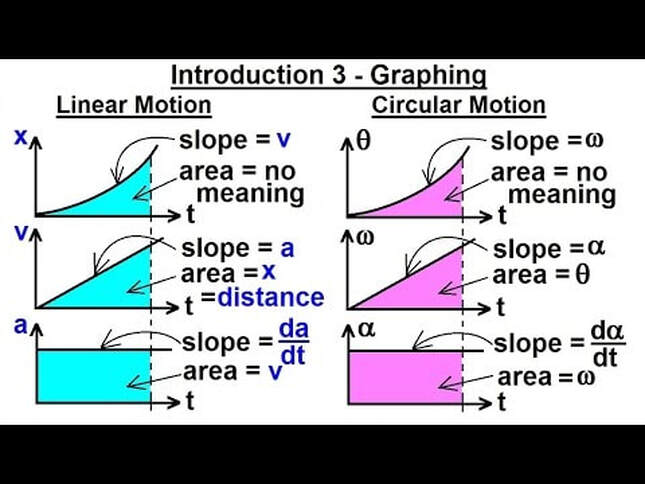
https://www.youtube.com/watch?v=Mom9-YZwapI
Torques
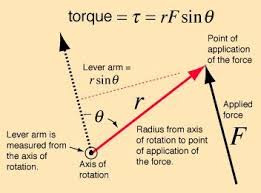
- Torque is a measure of the force that can cause an object to rotate about an axis. Just as force is what causes an object to accelerate in linear kinematics, torque is what causes an object to acquire angular acceleration.
- Torque is a vector quantity. The direction of the torque vector depends on the direction of the force on the axis.
- Extended Force Diagram:
https://www.mrwaynesclass.com/torque/reading/index03.html
- Torque and the Position of Force
- further from fulcrum (pivot point) increases the ability to rotate
- Torque and the Angle of Force
- the closer the angle is to perpendicular, the greater the torque
Rotational Kinetic Energy
- Torque and the Angle of Force
https://www.pinterest.com/pin/426082814734272581/
Static Equilibrium
- Net Torque = 0
- Net Force = 0
Rotational Inertia & Rotational Energy
- Rotational inertia is a property of any object which can be rotated. It is a scalar value which tells us how difficult it is to change the rotational velocity of the object around a given rotational axis.
- Rotational inertia plays a similar role in rotational mechanics to mass in linear mechanics. Indeed, the rotational inertia of an object depends on its mass. It also depends on the distribution of that mass relative to the axis of rotation.
- Rotational inertia is given the symbol I.
- and consequently rotational inertia has SI units of kg*m2.
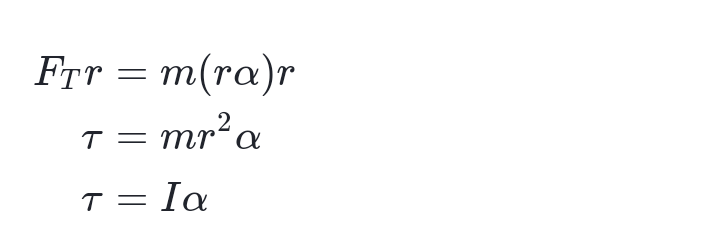
- How does rotational inertia relate to Newton's 2ⁿᵈ law?
https://keytlinsite.wordpress.com/category/uncategorized/page/2/
- The rotational inertia of an object depends on its mass. It also depends on the distribution of that mass relative to the axis of rotation.
- When discussing the change in rotational Inertia, radius is much more important than mass because according to the equation:
- I = mr^2
- if radius doubles, the rotational inertia will quadruple, but if the mass doubles, the rotational inertia will only double itself.
Rotational Kinetic Energy
- The kinetic energy of a rotating object is analogous to linear kinetic energy and can be expressed in terms of the moment of inertia and angular velocity. The total kinetic energy of an extended object can be expressed as the sum of the translational kinetic energy of the center of mass and the rotational kinetic energy about the center of mass. For a given fixed axis of rotation, the rotational kinetic energy can be expressed in the form.
http://hyperphysics.phy-astr.gsu.edu/hbase/rke.html
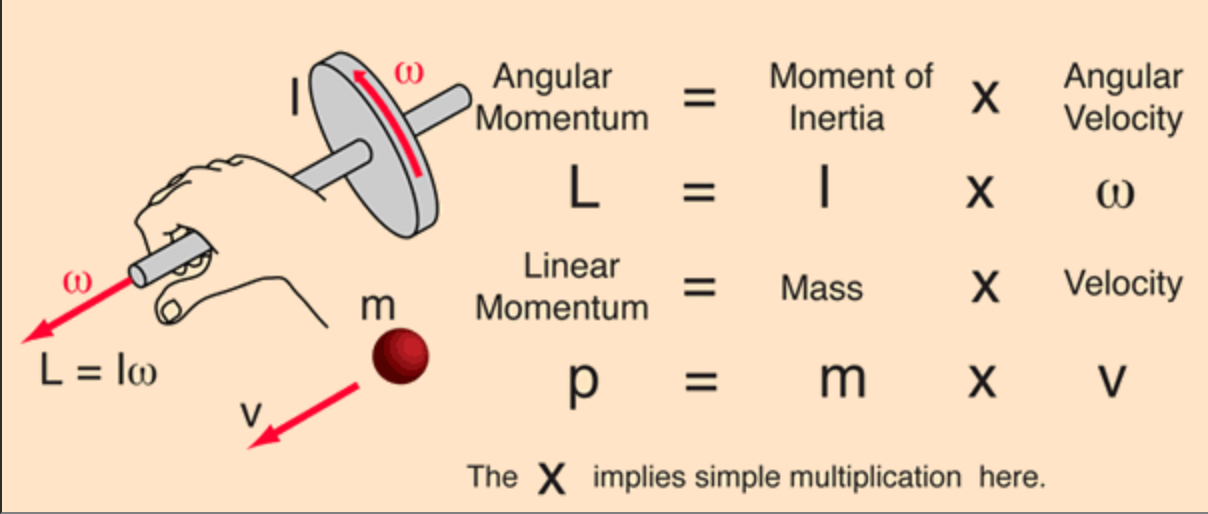
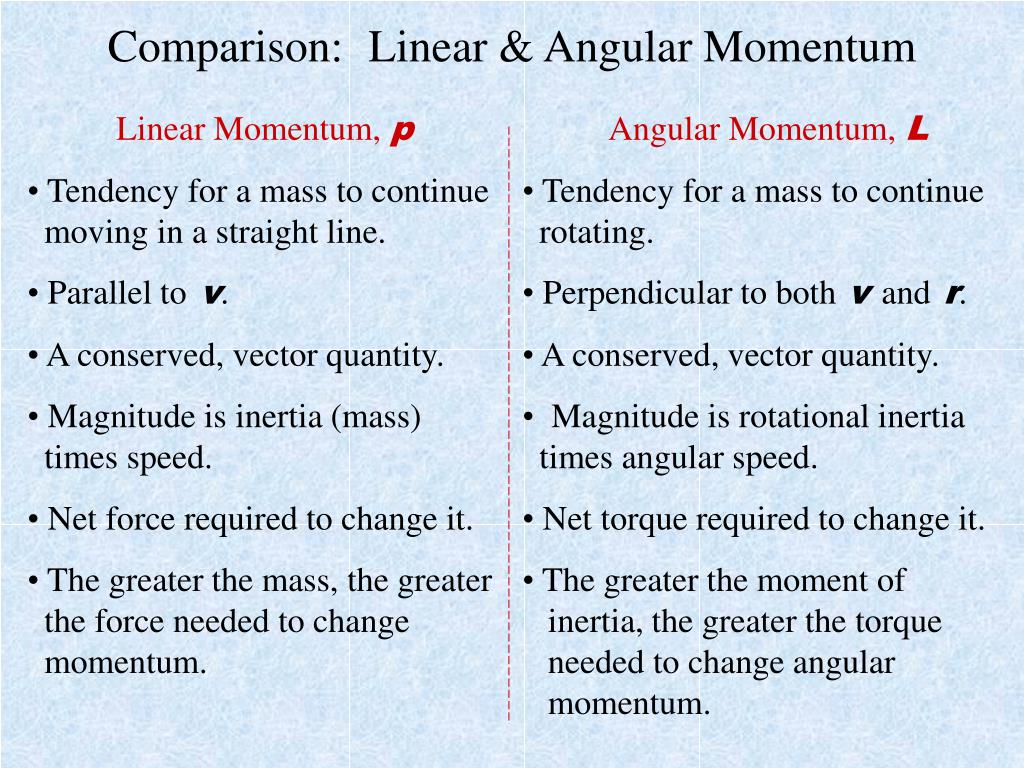
Angular Momentum/Impulse
- The angular momentum of a particle of mass m with respect to a chosen origin is given by:
L = mvr sin θ - or more formally by the vector product:
L = r x p - The direction is given by the right hand rule which would give L the direction out of the diagram. For an orbit, angular momentum is conserved, and this leads to one of Kepler's laws. For a circular orbit, L becomes:
L = mvr - Angular momentum and linear momentum are examples of the parallels between linear and rotational motion. They have the same form and are subject to the fundamental constraints of conservation laws, the conservation of momentum and the conservation of angular momentum .
http://hyperphysics.phy-astr.gsu.edu/hbase/amom.html
https://www.slideserve.com/Audrey/m-o-mentum
Widget is loading comments...
